")
Mục lục:
- Bước 1: Xem dự án của tôi hoạt động
- Bước 2: Nhận tất cả các tài liệu
- Bước 3: Tải chương trình lên bảng Arduino
- Bước 4: Bố trí các tuyến đường và tạo bố cục
- Bước 5: Sơ đồ mạch luôn hữu ích
- Bước 6: Kết nối các Turnouts với đầu ra của bảng điều khiển L298N
- Bước 7: Kết nối Đường dẫn bộ cấp nguồn với đầu ra khác của Bo mạch trình điều khiển L298N
- Bước 8: Kết nối Bảng điều khiển L298N với các Chân nguồn của Bảng Arduino
- Bước 9: Kết nối Cảm biến với Bảng Arduino
- Bước 10: Kết nối các Chân đầu vào của Trình điều khiển động cơ với Bảng Arduino
- Bước 11: Đặt tàu trên đường
- Bước 12: Tăng cường thiết lập
- Bước 13: XONG
- Tác giả John Day day@howwhatproduce.com.
- Public 2024-01-30 13:31.
- Sửa đổi lần cuối 2025-01-23 15:14.

Làm bố cục tàu mô hình là một sở thích tuyệt vời, tự động hóa nó sẽ làm cho nó tốt hơn rất nhiều! Hãy để chúng tôi xem xét một số lợi thế của tự động hóa của nó:
- Vận hành chi phí thấp: Toàn bộ bố cục được điều khiển bởi vi điều khiển Arduino, sử dụng trình điều khiển động cơ L298N, chi phí của chúng gần như không bằng gì so với các bộ điều khiển và bộ nguồn điều khiển tàu truyền thống.
- Lý tưởng để đặt ở màn hình: Vì không cần sự can thiệp của con người để giữ điều khiển trên bố cục, bạn có thể sử dụng nó ở màn hình mà bạn không thể luôn có mặt để điều khiển tàu và lượt.
- Tuyệt vời cho những người yêu thích vi điều khiển: Nếu bạn đang hoặc muốn bắt đầu với Arduino và lập trình, đây là một dự án tuyệt vời để bạn thực hành các kỹ năng của mình.
Nếu bạn quan tâm, bạn cũng có thể kiểm tra phiên bản trước của dự án này thậm chí còn đơn giản hơn.
Vì vậy, không cần quảng cáo thêm, chúng ta hãy bắt đầu!
Bước 1: Xem dự án của tôi hoạt động


Bước 2: Nhận tất cả các tài liệu

Để bắt đầu, hãy đảm bảo bạn có tất cả những điều sau:
- Ưu tiên sử dụng bo mạch vi điều khiển Arduino, UNO.
- Bảng điều khiển động cơ cầu H kép L298N.
- 6 dây nhảy nam sang nam.
- 7 dây nhảy nam đến nữ.
- Một cái tuốc nơ vít.
- Bộ chuyển đổi nguồn điện 12 volt-DC.
- Một đoạn đường có gắn cảm biến tiệm cận IR ở mặt dưới (tôi đã sử dụng đường ray Kato S62)
Bước 3: Tải chương trình lên bảng Arduino
Tải xuống Arduino IDE từ đây nếu bạn không có nó trên máy tính của mình. Sau đó tải xuống và mở tệp đã cho.
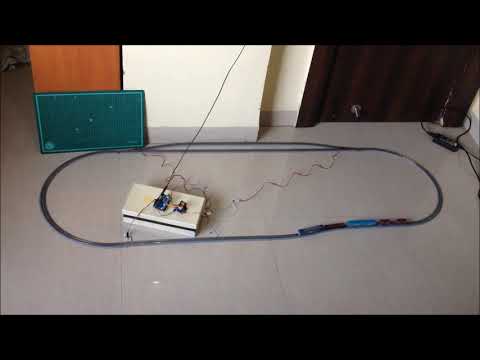
Bước 4: Bố trí các tuyến đường và tạo bố cục

Tạo một vòng tròn hình bầu dục với một mặt đi qua như hình trên. Đảm bảo khoảng cách giữa rãnh cảm biến và lượt đi đầu tiên mà đoàn tàu sẽ băng qua sau khi băng qua rãnh cảm biến lớn hơn chiều dài của đoàn tàu để không có phần nào của đoàn tàu vượt qua rãnh cảm biến khi tàu vượt qua lượt đi.
Bước 5: Sơ đồ mạch luôn hữu ích

Bấm vào hình ảnh để xem đầy đủ. Đảm bảo rằng bạn xem qua sơ đồ mạch đầy đủ và tất cả các chi tiết trước khi tiếp tục.
Bước 6: Kết nối các Turnouts với đầu ra của bảng điều khiển L298N




Nối dây đỏ và dây đen của cả hai đầu rẽ tương ứng với nhau, tạo ra kết nối song song. Sau đó, kết nối dây màu đỏ với đầu ra 4 và dây màu đen với đầu ra 3 của bảng điều khiển động cơ.
Bước 7: Kết nối Đường dẫn bộ cấp nguồn với đầu ra khác của Bo mạch trình điều khiển L298N


Kết nối dây màu trắng của bộ cấp nguồn với đầu ra1 và dây màu xanh lam với đầu ra2 của bảng điều khiển động cơ.
Bước 8: Kết nối Bảng điều khiển L298N với các Chân nguồn của Bảng Arduino

Kết nối chân 12 vôn với chân VIN của bảng Arduino, chân GND với chân GND của bảng Arduino và tốt nhất là chân 5 vôn của trình điều khiển động cơ với chân 5 vôn của bảng Arduino.
Bước 9: Kết nối Cảm biến với Bảng Arduino

Kết nối chân VCC của cảm biến với chân 5 volt của bảng Arduino, chân GND với chân GND của bảng Arduino và chân OUT với chân A0 của bảng Arduino.
Bước 10: Kết nối các Chân đầu vào của Trình điều khiển động cơ với Bảng Arduino

Kết nối các chân kỹ thuật số của bảng Arduino với các chân đầu vào của bảng điều khiển động cơ như sau:
- D9 đến IN1
- D10 đến IN2
- D11 đến IN3
- D12 đến IN4
Bước 11: Đặt tàu trên đường

Sau khi kiểm tra tất cả các kết nối dây, đặt tàu lên vách.
Bước 12: Tăng cường thiết lập

Tăng cường thiết lập và đảm bảo rằng các đầu rẽ được chuyển sang mặt bên, nếu không thì chỉ cần đảo ngược các kết nối của các đầu rẽ được thực hiện với trình điều khiển động cơ. Ngoài ra, hãy đảm bảo rằng đoàn tàu bắt đầu di chuyển theo hướng phía trước. Đảo ngược kết nối của đường ray trung chuyển với trình điều khiển động cơ nếu tàu di chuyển sai hướng.
Bước 13: XONG
Dự án đã hoàn thành, bây giờ. Bạn có thể mày mò mã Arduino để thay đổi chức năng của bố cục, thêm nhiều mặt, tất cả đều có thể tùy chỉnh! Tôi rất muốn biết về bất kỳ sửa đổi nào mà bạn thực hiện đối với dự án này, hãy cho tôi biết trong phần bình luận bên dưới. Tất cả những gì tốt nhất!
Đề xuất:
Bố cục đường sắt mô hình tự động đơn giản - Điều khiển Arduino: 11 bước (có hình ảnh)
")
Bố cục đường sắt mô hình tự động đơn giản | Điều khiển bằng Arduino: Bộ vi điều khiển Arduino là một bổ sung tuyệt vời cho việc xây dựng mô hình, đặc biệt là khi xử lý tự động hóa. Đây là một cách đơn giản và dễ dàng để bắt đầu tự động hóa mô hình đường sắt với Arduino. Vì vậy, không cần thêm bất kỳ quảng cáo nào nữa, chúng ta hãy bắt đầu
Bố cục đường sắt mô hình với mặt vượt tự động (V2.0): 13 bước (có hình ảnh)
: 13 bước (có hình ảnh)")
Bố trí đường sắt mẫu với mặt chắn ngang tự động (V2.0): Dự án này là bản cập nhật của một trong những dự án tự động hóa đường sắt mẫu trước đây, Bố cục đường sắt mẫu có mặt chắn tự động. Phiên bản này bổ sung thêm tính năng ghép và tách đầu máy với đầu máy toa xe. Hoạt động của
Bố cục đường sắt mô hình tự động chạy hai đoàn tàu: 9 bước

Bố cục đường sắt mô hình tự động chạy hai đoàn tàu: Tôi đã thực hiện một bố cục xe lửa mô hình tự động với việc đi qua một thời gian trước. Theo yêu cầu từ một thành viên khác, tôi đã thực hiện điều này có thể hướng dẫn. Điều này hơi giống với dự án đã đề cập trước đó. Cách bố trí có thể chứa hai đoàn tàu và chạy chúng luân phiên
Bộ đếm vạch vạch 2 chữ số LED: 6 bước (có hình ảnh)
")
Bộ đếm 2 chữ số LED Bargraph: Dự án này là một bộ đếm từ 1-99 được phát triển với hai 10 LED Bargraph và một Arduino Uno. Bộ đếm vạch vạch LED 2 chữ số hiển thị hoạt động của bộ đếm gồm 2 chữ số mà Đồ thị vạch LED thể hiện, một chữ số hàng chục và một chữ số khác.
Làm thế nào để đặt một phương tiện đường sắt cao tốc trên đường ray: 10 bước (có hình ảnh)
")
Cách Đặt Xe Hi-rail Đường sắt trên Đường ray: Các Biện pháp Phòng ngừa An toàn: Người đặt xe tải Đường sắt cao trên đường ray và người giúp đỡ phải mặc quần áo có tầm nhìn cao (ví dụ: áo vest, áo len, áo khoác) để được nhìn thấy bởi phương tiện giao thông đang tới. Cũng nên đeo bao tay và găng tay để