: 4 bước (có hình ảnh)")
Mục lục:
- Tác giả John Day day@howwhatproduce.com.
- Public 2024-01-30 13:34.
- Sửa đổi lần cuối 2025-01-23 15:15.
")
")
Tôi muốn điều khiển chiếc quadrocopter siêu nhỏ trong nhà bằng điện thoại thông minh của mình nhưng tôi không thể tìm ra giải pháp tốt cho việc này. Tôi đã có một vài mô-đun wifi ESP8266 đặt xung quanh vì vậy tôi quyết định tạo một mô-đun của riêng mình.
Chương trình bắt đầu một điểm truy cập wifi với một trang web HTML 5 để điều khiển tín hiệu PPM. Tín hiệu PPM được tạo ra bởi ngắt.
Nhờ HTML5, bạn có thể điều khiển thiết bị RC của mình bằng bất kỳ điện thoại thông minh nào mà không cần bất kỳ ứng dụng nào.
Bạn cũng có thể kết nối với trang web bằng PC và sử dụng cần điều khiển để điều khiển. Hiện tại, tính năng này chỉ hoạt động trên Firefox.
Trong phần dễ hiểu này, tôi sẽ giải thích cách thiết lập ESP8266 và cách định cấu hình bộ thu trong Betaflight.
Bước 1: Danh sách bộ phận

Hãy bắt đầu với danh sách các bộ phận. Bạn chỉ cần một vài thành phần:
- ESP8266: Bất kỳ mô-đun nào cũng hoạt động. Tôi sử dụng mô-đun ESP 12-F:
- một bộ chuyển đổi 3, 3V USB sang Serial để tải lên cổng kết nối lần đầu tiên. (Sau lần tải lên đầu tiên, bạn có thể sử dụng bản cập nhật OTA). Sử dụng một cái gì đó như thế này:
- Bộ điều chỉnh điện áp 3, 3V: ESP8266 cần 3, 3V. Bất kỳ điện áp nào trên 3, 6V sẽ làm chết thiết bị. Nó cũng có thể giảm dòng điện đỉnh khoảng 200mA. Nếu bạn không có nguồn cung cấp 3, 3V đủ mạnh ở mô hình RC của mình, bạn cần một bộ điều chỉnh điện áp bổ sung. Tôi sử dụng bộ điều chỉnh bước xuống này với điện trở 3, 9K Ohm:
- PC có Arduino IDE:
- Hỗ trợ ESP8266 cho Arduino IDE. Làm theo các hướng dẫn sau:
- Thư viện Websocket cho Arduino:
- Có thể là bộ dịch chuyển mức 3, 3V / 5V nếu bộ giải mã PPM của bạn không hỗ trợ đầu vào 3, 3V. Đối với hầu hết các bộ điều khiển chuyến bay quadcopter, bạn không cần điều này.
- Tích hợp WifiPPM: Tải xuống tệp bên dưới hoặc
- Điện thoại thông minh hoặc PC có phím điều khiển và Firefox
Bước 2: Thiết lập Điện tử và Tải lên Chương trình

Điều đầu tiên cần làm là thiết lập các kết nối nguồn với ESP8266. Bạn có thể xem hệ thống dây điện trong hình. Thực hiện các kết nối sau:
RST, EN và VCC đến 3, 3V
GPIO15 và GND sang GND
Đặt một tụ điện nhỏ giữa VCC và GND (khoảng 100 nF)
TXD thành RXD của thiết bị USB2Serial của bạn
RXD thành TXD của thiết bị USB2Serial của bạn
Đặt GPIO0 thành GND trong khi khởi động để vào chế độ flash.
Sau khi bạn đã cài đặt Arduino IDE, hỗ trợ ESP8266 và thư viện websocket sẽ mở bản phác thảo. Giữ GIO0 đến GND trong khi bật nguồn ESP8266 để vào chế độ flash. Bây giờ bạn có thể tải lên bản phác thảo.
Sau khi bạn đã tải lên bản phác thảo, bộ điều khiển sẽ đặt lại. Bạn nên tìm một Điểm truy cập WIFI có tên là WifiPPM. Nếu điều này là OK, bạn có thể tắt nguồn chip và ngắt kết nối các dây TXD, RXD và GPIO0. Trong tương lai, bạn có thể cập nhật chương trình qua OTA. Để làm như vậy, hãy kết nối với Điểm truy cập và truy cập "192.168.1.4/update" trong trình duyệt web của bạn.
Bước 3: Trang web


Giờ đây, bạn có thể kết nối GPIO5 với đầu vào PPM của bộ điều khiển máy bay hoặc bất kỳ thứ gì bạn sử dụng để giải mã tín hiệu PPM.
Sau khi cấp nguồn cho mô-đun, bạn có thể kết nối với Điểm truy cập "WifiPPM". Không có mật khẩu. Mở địa chỉ 192.168.4.1 trong trình duyệt của bạn.
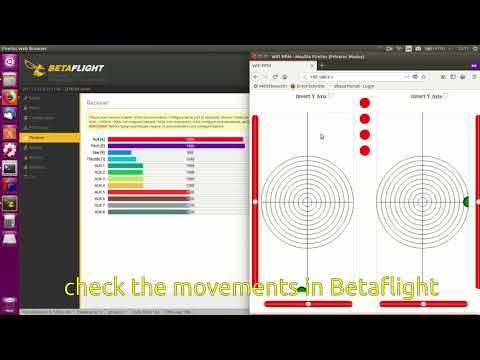
Bạn sẽ thấy trang web của hình ảnh đầu tiên. Trên thiết bị cảm ứng, bạn có thể điều khiển gậy bằng màn hình cảm ứng.
Nếu bạn mở trang web bằng PC, bạn phải sử dụng Firefox. Ngay sau khi bạn kết nối cần điều khiển, trang web sẽ thay đổi thành cần điều khiển mà bạn có thể thấy ở hình thứ hai. Bạn có thể điều khiển các gậy bằng cần điều khiển của mình.
Trong bước tiếp theo, tôi sẽ giải thích cách thiết lập Betaflight, vì tôi sử dụng nó. Nếu bạn sử dụng một số bộ điều khiển khác, bạn phải tự tiếp tục từ bây giờ.
Bước 4: Thiết lập Betaflight
Tôi sử dụng bộ điều khiển WifiPPM cho quadcopter của mình với Betaflight. Bây giờ tôi giải thích cách thiết lập nó.
- Kết nối bộ điều khiển chuyến bay của bạn với PC
- mở Betaflight
- kết nối với bộ điều khiển chuyến bay
- chuyển đến tab Người nhận
- gõ RTAE1234 vào trường bản đồ kênh
- thay đổi "Ngưỡng thanh thấp" thành 1020, "Thanh trung tâm" thành 1500 và "Ngưỡng thanh cao" thành 1980
- lưu các thay đổi
- mở trang web wifiPPM bằng điện thoại di động của bạn và kiểm tra xem việc điều chỉnh có ổn không
Đó là nó. Bạn xong việc rồi. Giờ đây, bạn có thể bay bằng điện thoại di động của mình mà không cần bất kỳ ứng dụng bổ sung nào.
Đề xuất:
Kiến thức về mạch tương tự - Tự làm mạch hiệu ứng âm thanh cho đồng hồ Ticking mà không cần IC: 7 bước (có hình ảnh)
")
Kiến thức về mạch tương tự - Tự làm mạch hiệu ứng âm thanh đồng hồ tích tắc mà không cần IC: Mạch hiệu ứng âm thanh đồng hồ tích tắc này được chế tạo chỉ với các bóng bán dẫn, điện trở và tụ điện mà không có bất kỳ thành phần vi mạch nào. Đó là lý tưởng để bạn học kiến thức mạch cơ bản bằng mạch đơn giản và thực tế này
Tự làm chuông cửa không cần cảm ứng mà không cần Arduino!: 7 bước

Tự làm Chuông cửa không chạm không cần Arduino !: Công tắc chuông cửa là một trong những thứ khiến người lạ cảm động nhất. Và với đại dịch covid 19 đang trở thành một vấn đề nghiêm trọng, việc duy trì vệ sinh tốt đã trở thành ưu tiên hàng đầu trong những ngày này. Vì vậy, trong hướng dẫn này, tôi sẽ chỉ cho bạn một cách đơn giản
Xây dựng IOT đầu tiên của bạn bằng cách sử dụng Arduino mà không cần mô-đun bổ sung: 5 bước (có hình ảnh)
")
Xây dựng IOT đầu tiên của bạn bằng cách sử dụng Arduino mà không cần mô-đun bổ sung: Thế giới đang trở nên thông minh hơn mỗi ngày và lý do lớn nhất đằng sau điều này là sự phát triển của công nghệ thông minh. Là một người đam mê công nghệ, chắc hẳn bạn đã từng nghe về thuật ngữ IOT có nghĩa là Internet of Things. Internet vạn vật có nghĩa là kiểm soát và cung cấp
Máy đo thời gian phản ứng (Hình ảnh, Âm thanh và Cảm ứng): 9 bước (có Hình ảnh)
: 9 bước (có Hình ảnh)")
Máy đo thời gian phản ứng (Hình ảnh, Âm thanh và Cảm ứng): Thời gian phản ứng là thước đo thời gian một người cần để xác định một kích thích và tạo ra phản ứng. Ví dụ: thời gian phản ứng âm thanh của vận động viên là thời gian trôi qua giữa khi bắn phát súng (bắt đầu cuộc đua) và anh ta hoặc cô ta bắt đầu cuộc đua. Tái kích hoạt
HC - 06 (Mô-đun Slave) Thay đổi "NAME" mà không cần sử dụng "Arduino nối tiếp màn hình" thành "Hoạt động dễ dàng": Cách không lỗi!: 3 bước
 Thay đổi \"NAME\" mà không cần sử dụng \"Arduino nối tiếp màn hình\" thành \"Hoạt động dễ dàng\": Cách không lỗi!: 3 bước")
HC - 06 (Mô-đun Slave) Thay đổi "NAME" mà không cần sử dụng "Arduino nối tiếp màn hình" … thành "Hoạt động dễ dàng": Faultless Way !: Sau " Thời gian dài " đang thử Thay đổi Tên thành HC - 06 (Mô-đun phụ), sử dụng " màn hình nối tiếp của Arduino, không có " Sucess ", Tôi đã tìm thấy một cách dễ dàng khác và tôi đang Chia sẻ ngay bây giờ! Có bạn thân vui vẻ