")
Mục lục:
- Tác giả John Day day@howwhatproduce.com.
- Public 2024-01-30 13:32.
- Sửa đổi lần cuối 2025-01-23 15:15.




Động lực
Tôi thực sự thích màn hình POV (sự bền bỉ của tầm nhìn)! Chúng không chỉ thú vị khi nhìn mà còn là một thách thức lớn để phát triển chúng. Đó là một nhiệm vụ thực sự liên ngành. Bạn cần rất nhiều kỹ năng: cơ khí, điện tử, lập trình, v.v.!
Tôi luôn muốn xây dựng của riêng mình và làm cho nó lớn nhất có thể. Một năm trước, tôi đã làm điều đó! Đó là rất nhiều công việc và rất phức tạp để làm. Tôi thích những thử thách kiểu này. Vì vậy, nó rất vui;-)
Bây giờ tôi cũng muốn bạn tự xây dựng một cái. Bạn có thể coi đây là hướng dẫn để tự phát triển hoặc chỉ cần làm theo hướng dẫn để nhận bản sao của màn hình POV của tôi. Tôi sẽ cố gắng chỉ ra tất cả những thách thức tôi đã phải vượt qua để trở thành của tôi.
Tôi đã lặp lại thiết kế của mình để làm cho nó dễ dàng nhất có thể xây dựng lại. Không có thành phần SMT và mọi thứ phải được hàn bởi những người mới bắt đầu. Đừng hiểu sai ý tôi, vẫn là một thử thách rất lớn để kết hợp mọi thứ lại với nhau. Nhưng nó có thể làm được!
CẢNH BÁO: Dự án này có các đèn LED được cập nhật với tốc độ cao và có khả năng gây ra cơn động kinh cho những người mắc chứng động kinh cảm quang
Làm thế nào nó hoạt động?
Ở đây, bạn có thể đọc cách hoạt động của màn hình POV nói chung.
Đầu tiên, chúng ta cần một nguồn phát tín hiệu video. Trong thiết kế ban đầu, tôi đã làm điều đó qua WIFI. Tôi đã viết một chương trình để chụp màn hình máy tính và gửi dữ liệu này đến ESP8266 qua WIFI. Vấn đề của phương pháp này là ESP8266 quá chậm và băng thông WIFI chỉ đủ cho 16 FPS. Vì vậy, bây giờ chúng tôi sử dụng một ESP32. Tôi đã nghĩ rằng tất cả các vấn đề đã được khắc phục, nhưng hóa ra là ESP32 cũng không cung cấp nhiều băng thông qua WIFI hơn so với ESP8266. Tuy nhiên, ESP32 có đủ sức mạnh tính toán để giải mã một luồng video. Vì vậy, tôi đã kết thúc việc gửi hình ảnh JPEG qua WIFI tới ESP32. Do đó, ESP32 lưu trữ một trang web. Trên trang web này, bạn có thể chọn hình ảnh hoặc video và trang web sau đó sẽ truyền các tệp JPEG tới ESP32. Giải mã JPEG cần nhiều bộ nhớ nên chúng tôi cũng gặp vấn đề ở đó. Nhưng nó hoạt động trong thời điểm này. Có lẽ tôi sẽ đưa ra một giải pháp tốt hơn sau này.
Tiếp theo, chúng ta cần tự mình điều khiển các đèn LED. Để điều này hoạt động, chúng ta cần biết vị trí chính xác của các đèn LED tại mọi thời điểm. Do đó tôi đã thêm một cảm biến hiệu ứng Hall. Mỗi vòng quay nó đi qua một nam châm và do đó cho phép phát hiện. Sau đó, chúng tôi đo thời gian của vòng quay. Chúng tôi giả định rằng lần quay tiếp theo sẽ mất thời gian tương tự. Do đó chúng ta có thể tính toán vị trí của mình. Quá trình này được lặp đi lặp lại. Để điều khiển đèn LED, chúng tôi sử dụng FPGA. Chúng tôi cũng có thể sử dụng một bộ vi xử lý nhưng nó có thể sẽ quá chậm. Hầu hết các đèn LED bên ngoài cần được làm mới khoảng 10.000 lần mỗi giây. Một FPGA có thể dễ dàng thực hiện nhiệm vụ và sẽ thực hiện điều đó mà ít bị giật hơn.
Nếu đèn LED cần được cập nhật thường xuyên, chúng tôi cũng cần đèn LED nhanh. Trong thiết kế ban đầu của tôi, tôi đã sử dụng đèn LED APA102. Chúng có tốc độ làm mới khoảng 20KHz. Tôi đã cố gắng lấy dải đèn LED với những đèn LED này nhưng người bán hàng trực tuyến đã gửi cho tôi SK9822 và sẽ cho tôi biết chúng giống nhau (đã xảy ra hai lần…) Vì vậy, chúng tôi sẽ sử dụng SK9822. Chúng chỉ có tốc độ làm tươi 4,7kHz, nhưng hy vọng điều này sẽ là đủ. Họ cũng có một giao thức hơi khác. Chỉ cần lưu ý. Vì vậy, ESP32 đang đẩy các khung hình ảnh sang FPGA. FPGA sau đó sẽ điều khiển các đèn LED.
Bây giờ các đèn LED chỉ cần xoay. Do đó chúng tôi sử dụng động cơ điện một chiều. Động cơ này được điều khiển qua tín hiệu PWM từ ESP8266. ESP8266 cũng được kết nối qua WIFI với ESP32. Do đó chúng ta chỉ cần một cảm biến để đo tốc độ quay. Trong thiết kế ban đầu, tôi đã sử dụng hai.
Thông tin thêm về hệ thống có thể được tìm thấy trong video của tôi về thiết kế ban đầu.
Công cụ
Tôi đã sử dụng các Công cụ sau:
- máy in 3D
- Sắt hàn
- Keo nóng
- keo siêu dính
- Cáp Micro USB
- Cây kéo
- Máy khoan + khoan gỗ 3 4 8 và 12mm
- Cái vặn vít
- Kìm dẹt
- Cắt mặt
- Thợ thoát y dây
- Vật tư sơn
- Giấy cát
Đặt hàng
Tôi đã mở một cửa hàng TINDIE. Vì vậy, bạn có thể mua một bộ nếu bạn muốn và giúp tôi làm nhiều dự án như thế này;-)
ATVSLĐ
Như mọi khi mọi thứ bạn thấy ở đây đều được xuất bản dưới dạng mã nguồn mở.
Cập nhật
Có một số điều tôi muốn cải thiện trong tương lai:
-
Độ phân giải màu cao hơn từ 12 bit đến 24 bit => do đó chúng ta cần một FPGA với nhiều RAM hơn =>
Cmod A7, chúng tương thích với pin:-)
- ESP32 với PSRAM để tránh các vấn đề về bộ nhớ
- Khắc phục sự cố bàn chải…
Quân nhu
Các bộ phận tùy chỉnh
Bạn cần đặt hàng chúng hoặc đặt một bộ từ tôi!
1 * PCB chính (các tệp gerber nằm trong thư mục gerber main.zip)
1 * Trình điều khiển động cơ PCB (các tệp gerber nằm trong thư mục gerber motor.zip)
4 * Corners 3D 1 Print (tệp stl nằm trong thư mục 3D góc.stl)
1 * Main PCB Holder 3D 3 Print (các tệp stl nằm trong thư mục 3D Holder1.stl, Holder2.stl, Holder3.stl)
1 * Chủ chổi 3D 2 In (các tệp stl nằm trong thư mục 3D brush1.stl và brush2.stl)
Bộ phận tiêu chuẩn
Hãy cẩn thận, một số liên kết bao gồm 10 hoặc thậm chí 100 gói.
Dải LED 1m * SK9822 với 144 LED / m
1 * Cmod S6 FPGA
1 * Geekcreit 30 Pin Phát triển ESP32
1 * Geekcreit D1 mini V2.2.0 ESP8266
4 * 74HCT04
5 * DC-DC 5V 4A
1 * Động cơ DC 775
44 * 100nf 50V
9 * 220uf 16V
10 * Nam châm Neodymium 10mmx2mm
1 * Cảm biến hiệu ứng Hall
2 * Carbon Bruches Dremel 4000
2 * Chổi than động cơ
2 * Vòng bi 6803ZZ
2 * Giá đỡ động cơ 775
2 * Giắc cắm DC 5.5 x 2.1mm
1 * Nguồn cung cấp
1 * Nút 8mm
2 * XT30PB Cắm PCB Nam và Nữ
2 * XT30 Cắm Cáp Nam và Nữ
Điện trở 2 * 130Ohm 1 / 4W
2 * MOSFET IRF3708PBF
2 * 1N5400
1 * Đầu ghim hàng đơn
1 * Tiêu đề Nữ
1 * Cáp 30AWG
1 * Cáp 22AWG
Cửa hàng phần cứng
1 * MDF 500mm x 500mm x 10mm
1 * MDF 100mm x 500mm x 10mm
4 * MDF 200mm x 510mm x 10mm
1 * kính acrylic 500mm x 500mm x 2mm
12 * Góc kim loại 40mm x 40mm x 40mm
40 * Vít gỗ 3mm x 10mm
Miếng đệm 6 * M3 12 mm
Vít M3 và M4
3m * Cáp 2,5mm2 dây đơn / cứng
Sơn đen cho gỗ MDF
Thời gian xây dựng: ~ 10 giờ
Chi phí xây dựng: ~ 300 €
Bước 1: Tải xuống tệp

Để bắt đầu, trước tiên chúng ta cần tải xuống mọi thứ cần thiết cho dự án này.
Truy cập trang phát hành kho lưu trữ tại đây.
Sau đó tải xuống Release.zip từ bản phát hành cuối cùng và giải nén nó trên máy tính của bạn.
Mỗi khi tôi tham chiếu đến một tệp trong hướng dẫn này, bạn sẽ tìm thấy nó ở đó;-)
Bước 2: Phần mềm chương trình
Bước 2.1: Lập trình FPGA
Để lập trình FPGA, chúng ta cần cài đặt một phần mềm từ xilinx:
Đối với Windows 10, bạn cần cài đặt: ISE Design Suite cho Windows 10 (~ 7GB)
Đối với Windows 7 hoặc XP, bạn có thể cài đặt: Lab Tools (~ 1GB)
Sau khi cài đặt Mở ISE iMPACT và nhấp vào "Không" nếu được hỏi và cũng "Hủy" cho một biểu mẫu dự án mới. Kết nối FPGA Board Cmod S6 và đợi trình điều khiển cài đặt. Nhấp đúp vào quét ranh giới. Sau đó nhấp chuột phải vào cửa sổ mới và chọn "Khởi tạo chuỗi". Nhấp vào "Không" một lần nữa và đóng biểu mẫu mới. Bây giờ bạn sẽ thấy một biểu tượng "SPI / BPI", nhấp đúp vào nó. Chọn tệp "SPIFlash.mcs". Trong biểu mẫu mới, hãy chọn "SPI PROM" và "S25FL128S" và Độ rộng dữ liệu "4". Nhấp vào "OK". Sau đó nhấp một lần nữa vào biểu tượng "FLASH". Bây giờ nó sẽ có màu xanh lá cây. Sau đó nhấn "Chương trình". Nhấp vào "OK" trên biểu mẫu mới và chờ đợi. Quá trình này có thể mất vài phút.
Làm tốt lắm, FPGA đã sẵn sàng;-) Bạn có thể rút phích cắm của nó một lần nữa!
Bước 2.2: Lập trình ESP32
Cài đặt lõi esp32 trên Arduino ID, bạn có thể làm theo hướng dẫn này. V1.0.2 được khuyến khích.
Thư viện cần thiết:
- AutoPID của Ryan Downing V1.0.3 (có thể được cài đặt qua trình quản lý thư viện)
- ArduinoWebsockets của Gil Maimon, được tôi sửa đổi (tải xuống tệp zip và cài đặt nó)
Mở tệp povdisplay.ino trong thư mục povdisplay.
Chọn bên dưới bảng công cụ: "DOIT ESP32 DEVKIT V1". Giữ nguyên các cài đặt khác.
Kết nối bo mạch esp32 qua USB và tải xuống chương trình.
Bước 2.3: Lập trình ESP8266
Cài đặt lõi ESP8266 trên ID Arduino, bạn có thể làm theo hướng dẫn này.
Không cần thư viện!
Mở tệp motordrive.ino trong thư mục motordrive.
Chọn trong Bảng công cụ: "Mô-đun ESP8266 chung". Giữ nguyên các cài đặt khác.
Kết nối bo mạch esp8266 qua USB và tải xuống chương trình.
Bước 3: Hàn PCB




BƯỚC 3.1 Trình điều khiển động cơ hàn PCB
Các thành phần sau được hàn:
-
WEMOS1 (Geekcreit D1 mini V2.2.0 ESP8266)
- Hàn các đầu ghim vào bảng WEMOS
- Hàn các tiêu đề nữ trên PCB
-
DCDC (DC-DC 5V 4A)
- Sử dụng 4 chân tạo thành tiêu đề chân và hàn trực tiếp bộ chuyển đổi DC-DC vào bo mạch
- Hãy cẩn thận về hướng, nó phải phù hợp với màn lụa
- CN1 (Giắc cắm DC 5,5 x 2,1mm)
-
1N5400
Hãy cẩn thận về hướng, vạch trắng trên diode phải cùng phía với vạch trên màn lụa
-
220u (220uf 16V)
Hãy cẩn thận về hướng, vạch trắng phải nằm ở phía đối diện của dấu cộng trên màn lụa
- R1 và R1 (Điện trở 130Ohm 1 / 4W)
-
Q1 và Q2 (MOSFET IRF3708PBF)
Cẩn thận về hướng, mặt sau bằng kim loại phải nằm ở phía có đường kẻ dày trên màn lụa
-
ĐỘNG CƠ (XT30PB Plug Female PCB)
Cẩn thận về hướng, đầu tròn phải ở phía được đánh dấu trên màn lụa
-
LEDS và TASTER (PCB Nam Cắm XT30PB)
Cẩn thận về hướng, đầu tròn phải ở phía được đánh dấu trên màn lụa
BƯỚC 3.2 hàn PCB chính
Các thành phần sau được hàn:
-
CMODS6 (Cmod S6 FPGA)
Nên có các tiêu đề ghim đi kèm. Hàn chúng trên PCB
-
ESP (Geekcreit 30 Pin Phát triển ESP32)
Sử dụng Tiêu đề Nữ và hàn chúng trên PCB
-
DCDC1 - DCDC4 (DC-DC 5V 4A)
- Sử dụng 4 chân từ đầu ghim và hàn trực tiếp bộ chuyển đổi DC-DC vào bo mạch
- Hãy cẩn thận về hướng, nó phải phù hợp với màn hình lụa
- POWER_TEST (Giắc cắm DC 5,5 x 2,1mm)
-
D1 (1N5400)
Cẩn thận về hướng, vạch trắng trên diode phải cùng phía với vạch trên màn lụa
-
POWER (XT30PB Plug Female PCB)
Hãy cẩn thận về hướng, đầu tròn phải ở phía được đánh dấu trên màn lụa
-
C1, C3, C4, C6, C7, C9, C10, C11 (220uf 16V)
Cẩn thận về hướng, vạch trắng trên tụ điện phải nằm ở phía đối diện với dấu cộng trên màn lụa
- C2, C5, C8, C12 (100nf 50V)
-
IC1 - IC4 (74HCT04)
Cẩn thận để căn chỉnh phần cắt của vi mạch với dấu trên màn hình lụa
BƯỚC 3.3 Keo nóng
PCB chính sẽ xoay rất nhanh. Vì vậy, chúng ta cần phải dán các tụ điện (C1, C3, C4, C6, C7, C9, C10, C11) vào PCB để tránh sự cố. Chỉ cần sử dụng một loại keo nóng cho điều đó.
Bước 4: Chuẩn bị dải




BƯỚC 4.1 Cắt dải thành nhiều mảnh
Loại bỏ lớp bảo vệ chống nước bằng kéo.
Chúng ta cần bốn WINGs và mỗi cánh chứa bốn nhóm. One WING rất đặc biệt, nó có nhiều đèn LED hơn những chiếc khác.
WING1:
- G1: 5 đèn LED (nhóm bên ngoài nhất)
- G2: 6 đèn LED
- G3: 8 đèn LED
- G4: 14 đèn LED
WING2 - WING4:
- G1: 5 đèn LED (nhóm bên ngoài nhất)
- G2: 6 đèn LED
- G3: 8 đèn LED
- G4: 13 đèn LED
Do đó, chúng tôi cần 129 đèn LED và dải của chúng tôi có 144 vì vậy chúng tôi có một số khả năng cho một vết cắt sai;-) Trong trường hợp xấu nhất, bạn có thể hàn vết cắt.
Cắt càng chính giữa các đèn LED càng tốt.
BƯỚC 4.2 Hàn cáp vào dải LED
Trên mỗi đoạn dải LED hàn hai dây 30AWG trên đồng hồ và chân dữ liệu. Đây là hai chốt ở giữa. Cẩn thận hàn chúng vào đầu vào của dải đèn LED. Thông thường, các mũi tên hiển thị hướng của luồng dữ liệu. Các dây cáp phải dài khoảng nửa mét
Cắt bỏ mọi thứ từ phía bên kia của dải để tránh sự thiếu hụt giữa dữ liệu và chân đồng hồ của các nhóm khác nhau khi chúng ta đặt các WINGs lại với nhau.
BƯỚC 4.3 Tụ hàn
Trên mỗi nhóm hàn hai tụ điện (100nf 50V) ở mặt sau của các đoạn dải LED ở mỗi đầu. Đối với G4 cũng hàn một ở giữa. Các dây cáp nên đi dưới các tụ điện để chừa ra một số không gian nhưng không quá nhiều.
BƯỚC 4.4 Đặt các WINGs lại với nhau
Đối với mỗi WING dẫn các dây từ G1 đến G2 và sau đó các dây này qua G3 và tương tự với G4.
BƯỚC 4.4 Hàn các nhóm lại với nhau
Bây giờ chúng ta cần cáp đồng (cáp 2,5mm2 dây đơn / cứng). Cắt nó thành tám miếng có chiều dài khoảng ~ 30cm. Dải cách điện của tất cả các dây. Kéo thẳng dây cáp càng nhiều càng tốt. Bạn có thể cố định một đầu trong kẹp vít và giữ đầu kia bằng kìm dẹt rồi dùng búa đập vào kìm.
Cố định cáp ở một bên để làm việc với nó dễ dàng hơn. Sau đó hàn nhóm đầu tiên vào nó. Căn chỉnh đoạn dải LED với cáp và hàn nó ở một bên với hai tụ điện. Cáp phải nằm phẳng trên dải đèn LED. Tiếp tục với nhóm tiếp theo. Hãy cẩn thận rằng khoảng cách giữa hai nhóm LED cũng là 7mm. Cuối cùng, tất cả các đèn LED phải có cùng khoảng cách giữa chúng. Tiếp tục với hai nhóm còn lại. Ở nhóm cuối cùng hàn cả ba tụ điện vào dây dẫn.
Sau đó cắt cáp ở cuối. Tiếp tục với một sợi cáp khác ở phía bên kia của dải.
Bây giờ WING đầu tiên đã hoàn thành! Làm tương tự cho ba Cánh còn lại.
BƯỚC 4.5 Uốn các tụ điện
Chỉ cần uốn cong tất cả chúng để làm cho các dải mỏng.
Bước 5: Hàn các dải trên PCB chính




BƯỚC 5.1 Kiểm tra phân cực
Đầu tiên chúng ta cần biết độ phân cực của dải LED. Nói cách khác: Trường hợp 5V và nối đất là liên quan đến PCB. Điều này thực sự phụ thuộc vào dải đèn LED mà bạn có và có thể là bất kỳ cách nào xung quanh.
Giữ một WING trên PCB chính. Các mũi tên trên dải đèn LED phải hướng vào trung tâm của PCB. Bây giờ, hãy xem 5V ở phía DATA hay phía ĐỒNG HỒ của các chân.
Nếu 5V ở phía DATA, bạn là tốt và bạn có thể sử dụng đồng 2,5mm2 để hàn dải LED trực tiếp với PCB.
Nếu không, bạn cần sử dụng cáp 22AWG để cắt chéo hai bên. Do đó, hãy hàn cáp vào dải đèn LED và gạch bỏ phần bên trái và bên phải và hàn nó vào PCB.
BƯỚC 5.2 Hàn cáp 2,5 mm2
Sử dụng phần còn lại của cáp đồng 2,5 mm2 và dải tất cả. Hàn chúng ở mặt trên của PCB. Cắt dây hàn có cùng chiều cao khoảng 1cm.
BƯỚC 5.3 Hàn WING đầu tiên
Sử dụng WING dài hơn và định vị nó trên PCB (LED1) như hiển thị trên màn hình lụa. Hàn nó vào các dây 2,5 mm2. Thực hiện các kết nối thực sự mạnh mẽ, điều này sẽ thấy rất nhiều lực trong quá trình quay! Sau đó kết nối cáp cho Nhóm 1 với Dữ liệu G1 và Đồng hồ G1.
Đừng quên hàn kết nối nguồn như mô tả ở trên.
Kết nối ESP32 và FPGA (48 và 1 ở bên được đánh dấu) và cấp nguồn cho bo mạch bằng nguồn điện.
Hầu hết các đèn LED bên ngoài sẽ nhấp nháy màu xanh lam ngay bây giờ (có thể mất tới 40 giây để làm như vậy). Nếu không, hãy kiểm tra xem bạn đã kết nối CLOCK và DATA đúng cách chưa.
BƯỚC 5.4 Cảm biến hiệu ứng Hall
Hàn đầu ghim Nữ (có ba chốt) vào Hội trường. Sau đó, chúng tôi sẽ kết nối cảm biến với nó.
Hàn cảm biến (cảm biến hiệu ứng Hall) vào đầu cắm pin đực. Các liên kết với senor và đầu ghim phải có kích thước khoảng 25mm.
BƯỚC 5.5 Tiếp tục với phần còn lại của WINGS
Đối với LED2 - LED4 == WING2 - WING4 thực hiện quy trình tương tự như với WING1.
Thỉnh thoảng hãy cấp nguồn cho PCB và kiểm tra xem mọi thứ có nhấp nháy không. Mô hình bắt đầu với đèn led bên ngoài nhất và đi vào trong và bắt đầu lại.
BƯỚC 5.6 Số dư
Cố gắng cân bằng PCB chính ở giữa với một vật thể nhọn. Nếu một bên nặng hơn, hãy cố gắng thêm chất hàn vào bên kia. Nó không nhất thiết phải hoàn hảo, nhưng mất cân bằng quá nhiều sau này sẽ dẫn đến rung lắc nhiều trong quá trình hoạt động, có thể dẫn đến các vấn đề cơ học.
Bước 6: Sơn đầu tiên

Bước 6.1: Khoan
Chúng ta cần khoan một số lỗ:
Trên tấm ván MDF 500 * 500, chúng ta cần hai lỗ. Nhìn vào file khoan_wood_500_500.pdf và khoan các lỗ theo kế hoạch.
Trên tấm ván MDF 500 * 100, chúng ta cần rất nhiều lỗ. Do đó, hãy in tệp khoan_wood_500_100_A4.pdf và căn chỉnh nó trên bảng. Chỉ cần khoan các lỗ được đánh dấu trên giấy.
Bước 6.2: Sơn
Sơn một mặt của mỗi tấm gỗ. Đối với ván MDF 500 x 500, đó là mặt bạn đã khoan.
Sơn cả hai mặt của tấm gỗ 100x500.
Bạn cũng có thể sơn đen các góc kim loại. Cái này sẽ đẹp hơn;-)
Phần còn lại chúng tôi sẽ được sơn khi chúng tôi đã lắp ráp tất cả mọi thứ (bên ngoài của hộp).
Bước 7: Lắp ráp cơ khí

Bước 7.1 Gắn PCB trình điều khiển động cơ
PCB được gắn trên tấm ván MDF 100 x 500. Sử dụng miếng đệm (miếng đệm M3 12 mm) và một số vít và đai ốc m3.
Bước 7.2 Gắn dấu ngoặc
Gắn hai giá đỡ (Giá đỡ động cơ 775) trên Bảng MDF 100 x500 bằng vít M4.
Bước 7.3 Chuẩn bị Chủ
Cần tắt hai thanh đòn (Vòng bi 6803ZZ). Chúng tôi chỉ cần hai vòng ngoài từ nó.
Hàn 22AWG dây trên mỗi vòng. Một màu đen và một màu đỏ.
Lấy các bộ phận in 3D của Holder và lắp ráp chúng.
Đặt tất cả bảy đai ốc M3 vào các lỗ tương ứng của chúng và trượt vòng có dây màu đỏ trước trên giá đỡ, sau đó đến miếng đệm và sau đó là vòng có dây đen. Thêm miếng thứ ba lên trên và lắp các vít.
Cắt hai dây ở khoảng cách 2 cm và hàn jeck (Cáp nam cắm XT30) vào nó. Cáp màu đen đi về phía bị cong.
Bước 7.4 Gắn động cơ
Vặn động cơ (Động cơ DC 775) vào giá gắn động cơ ở giữa tấm ván MDF 100 x500.
Gắn giá đỡ vào động cơ và vặn chặt.
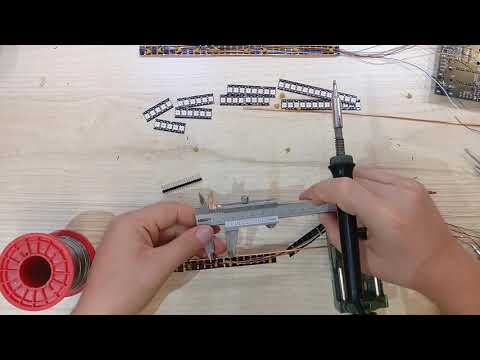
Bước 7.5 Cài đặt Brushes
Tôi dự định sử dụng một bàn chải Dremel (Bàn chải Carbon Dremel 4000). Chúng tôi cần sử dụng một loại than khác (Bàn chải carbon động cơ) vì than cho bàn chải Dremel có điện trở quá cao. Tôi đã bỏ qua điều đó trong quá trình phát triển. Vì vậy, chúng tôi sử dụng bàn chải động cơ và chà nhám chúng theo kích thước của bàn chải dremel.
Cắt dây ra khỏi chổi than động cơ ở vị trí cách than 5 mm.
Sau đó ta dùng giấy nhám để xén than theo kích thước sau: 8,4 x 6,3 x 4,8 mm
Một mặt của chổi động cơ là 6,1 mm, vì vậy chúng ta chỉ cần chà nhám hai mặt.
Bạn có thể thử nếu nó trượt dễ dàng trong giá đỡ bàn chải, thì không sao cả.
Cũng cố gắng mài một đường cong trên đỉnh để cải thiện kết nối với các vòng kim loại.
Hàn một dây 22AWG tại than cho cả hai loại than. Sử dụng một dây màu đỏ và màu đen. Chèn lò xo từ bàn chải dremel.
Chèn bàn chải vào giá đỡ bàn chải. Bàn chải với dây màu đỏ đi ở trên cùng. Mặt trên của ngăn chứa dày hơn một chút. Cẩn thận để hai lò xo không chạm vào nhau.
Gắn giá đỡ vào đế bằng đai ốc và vít m3.
Gắn đế của giá đỡ bàn chải vào giá gắn động cơ cố định được gắn phanh. Sử dụng vít và đai ốc M4 đi kèm với giá đỡ.
Động cơ có thể quay tự do.
Hướng dẫn hai dây giữa hai giá đỡ.
Cắt hai dây theo chiều dài để chúng có thể vừa chạm tới PCB và hàn jeck (Cáp nam cắm XT30) vào nó. Cáp màu đen đi đến mặt cong.
Hàn hai dây 22AWG vào động cơ và cắt chúng ở khoảng cách xa để dễ dàng tiếp cận PCB và hàn jeck (cáp cái cắm XT30) vào nó. Cáp màu đen đi đến mặt cong.
Bước 8: Kết thúc
Đề xuất:
Nike LED Swoosh! Đây là một trang trí tuyệt vời cho một căn phòng. Đây là một dự án mà mọi người có thể lặp lại.: 5 bước

Nike LED Swoosh! Đây là một trang trí tuyệt vời cho một căn phòng. Đây là một dự án mà mọi người có thể lặp lại. 2x-gỗ 20-20-3000 2x-ván ép 500-1000mm-vít (45mm) 150x-vít (35mm) 30x-scr
Tắt đèn pha khi tắt đánh lửa: 9 bước (có Hình ảnh)
")
Tắt Đèn Pha Khi Đánh Lửa: Tôi mua cho con trai lớn một chiếc Mazda 3 2007 đã qua sử dụng vào tuần trước. Nó đang ở trong tình trạng tuyệt vời và anh ấy thích nó. Vấn đề là vì nó là một mô hình cơ sở cũ hơn, nó không có bất kỳ chuông hoặc còi bổ sung nào giống như đèn pha tự động. Anh ấy đang lái chiếc Toyota Coroll
Điện tử Tất cả các mùa, Tất cả các ngày lễ, Bông tai LED: 8 bước (có hình ảnh)
")
Điện tử Tất cả các mùa, Tất cả các ngày lễ, Bông tai LED: OK, vì vậy chúng tôi sắp làm một số bông tai khá cao cấp. Đây KHÔNG phải là một dự án mới bắt đầu và tôi khuyên những người muốn tiếp tục điều này, hãy bắt đầu với các dự án nhỏ hơn và rèn luyện kỹ năng của bạn cho đến điều này.Vì vậy, trước tiên .. Những thứ chúng ta sẽ cần. (BỘ PHẬN) (1) L
Thêm giắc cắm đồng bộ Pc vào cáp Nikon Sc-28 Ttl (sử dụng Cài đặt tự động cho đèn flash trên máy ảnh và kích hoạt đèn flash máy ảnh tắt !!): 4 bước
: 4 bước")
Thêm Giắc cắm Pc Sync vào Cáp Nikon Sc-28 Ttl (sử dụng Cài đặt Tự động cho Đèn flash trên Máy ảnh và Kích hoạt Tắt Đèn flash Máy ảnh !!): trong phần hướng dẫn này, tôi sẽ chỉ cho bạn cách tháo một trong các đầu nối 3pin TTL độc quyền của Pesky trên mặt bên của máy ảnh Nikon SC-28 đứt cáp TTL và thay thế nó bằng đầu nối đồng bộ PC tiêu chuẩn. điều này sẽ cho phép bạn sử dụng đèn flash chuyên dụng, s
Chế tạo một rô bốt rất nhỏ: Làm rô bốt có bánh xe nhỏ nhất thế giới với một cái gắp.: 9 bước (có hình ảnh)
")
Chế tạo rô bốt rất nhỏ: Làm rô bốt có bánh xe nhỏ nhất thế giới có kẹp gắp: Chế tạo rô bốt 1/20 inch khối với bộ gắp có thể nhặt và di chuyển các vật thể nhỏ. Nó được điều khiển bởi vi điều khiển Picaxe. Tại thời điểm này, tôi tin rằng đây có thể là robot có bánh xe nhỏ nhất thế giới với một cái gắp. Điều đó chắc chắn sẽ ch