")
Mục lục:
- Tác giả John Day day@howwhatproduce.com.
- Public 2024-01-30 13:32.
- Sửa đổi lần cuối 2025-01-23 15:15.



Hie các bạn..
Bạn đã bao giờ lang thang để làm một Bảng mê cung có thể được điều khiển từ Điện thoại thông minh Android của bạn….!
Tốt bạn đang ở đúng nơi. Tôi đã tạo một cái cho riêng mình bằng Arduino và Android.
Don t lo lắng nó dễ dàng,.. Trong dự án này, tôi sẽ chỉ cho bạn cách thực hiện:
1. Labyrinth Board (tôi làm nó từ những hộp gỗ cũ đặt xung quanh).
2. Ứng dụng Android trong nhà phát minh ứng dụng để điều khiển bảng.
3. Viết chương trình trong Arduino để điều khiển Bảng và
4. Thiết lập mạch….
Sau đó, bạn có thể sử dụng khái niệm đã học trong các dự án khác mà bạn sẽ xây dựng..
Vì vậy, không lãng phí thời gian nữa, hãy bắt đầu….!
Bước 1: Thu thập các thành phần



Đối với dự án này, bạn sẽ yêu cầu các mục sau:
1. Hai động cơ servo (tôi đã sử dụng những động cơ mini và chúng phù hợp với tôi).
2. Arduino Uno. (Tôi khuyên bạn nên mua nó từ snapdeal, một bản sao của nó nhưng đáng giá từng xu tôi đã bỏ ra)
3. Một mô-đun Bluetooth.
4. A Breadboard.
5. Một số dây nhảy
6. Gỗ mỏng hoặc ván cứng
7. đinh, một số thanh phím từ bàn phím cũ
8. Thermocol (Polystyrene)
Bước 2: Lập bảng mê cung



Đây là phần cơ khí của dự án..
Đầu tiên đối với cơ sở lấy mảnh ván gỗ hoặc bìa cứng hình chữ nhật dài. nó phải lớn hơn bảng nghiêng thực tế..
Cắt hai miếng gỗ hình khối nhỏ bằng nhau..
và thêm một chiếc đinh vào mỗi chiếc, sao cho chúng có độ cao bằng nhau tính từ chân đế. Cũng cắt thêm một số mảnh gỗ để làm giá đỡ cho các cột trụ..
bây giờ cho bảng hàng đầu..
tạo một khung nhỏ hơn phần đế, đây sẽ là trục x của chúng ta, ở mặt ngoài của các cạnh nhỏ hơn của khung tạo các lỗ nhỏ chính xác ở tâm của các cạnh. cắt các que thành một nửa và dán chúng vào các cạnh lớn của khung hướng vào trong. cắt chúng thành một nửa trước khi làm như vậy.
điều này sẽ giữ bảng trên cùng với khung và sẽ giúp xoay.
bây giờ thêm các trụ cột vào các lỗ bên ngoài để làm cho khung đứng trên đế.
dính các trụ vào đế và cũng gắn các giá đỡ vào chúng.
bây giờ để thêm các động cơ servo.
một cái sẽ được gắn vào đế và sẽ được gắn vào khung bằng cách sử dụng một thanh nhỏ để xoay khung
một cái khác sẽ được gắn vào khung và sẽ được gắn vào Bảng trên cùng bằng cách sử dụng một thanh nhỏ để xoay bảng trên cùng.
các servo phải được gắn vuông góc với nhau như trong hình.
bây giờ bảng đã sẵn sàng.
tôi đã tạo mê cung bằng cách sử dụng thermocol và một bảng thẻ.
Bước 3: Thiết lập mạch

Thiết lập mạch như trong hình…
Hãy nhớ đối với servo tôi đang sử dụng dây màu đỏ là cực dương, màu nâu là cực âm và màu cam là tín hiệu.
Mô-đun Bluetooth
Rx chuyển đến chân 1
Tx chuyển đến chân 0
Dây tín hiệu của servo cơ sở đi đến chân 5
Dây tín hiệu của khung servo đi đến chân 6
Hãy nhớ thêm nguồn điện bổ sung cho mô-đun servo và bluetooth.. mô-đun khôn ngoan khác sẽ không nhận đủ dòng điện và sẽ tiếp tục ngắt kết nối, hiển thị lỗi 516. Tôi đã gặp rất nhiều khó khăn khi khắc phục sự cố và cuối cùng đã tìm ra sự cố và giải pháp.
Bước 4: Tạo ứng dụng

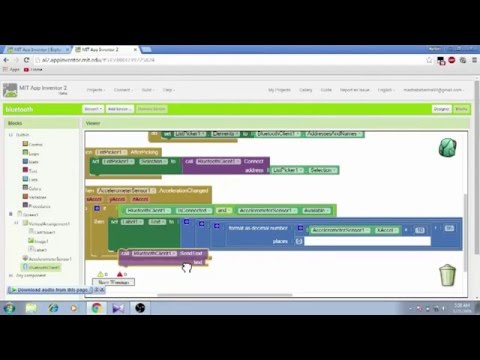

Được rồi, trước hết, bạn cần đăng nhập vào trình phát minh ứng dụng mit để tạo bất kỳ ứng dụng nào..
truy cập
và nhấp vào Tạo ứng dụng! ở góc trên cùng bên phải, hãy đăng ký và bạn đã sẵn sàng….
Mọi thứ khác tôi đã hiển thị trong video.. hãy xem.
đây là cơ bản:
khi màn hình được khởi chạy trong ứng dụng (Trong trường hợp này là Screen1), - gia tốc kếSensor được bật và độ nhạy được đặt thành tối đa, tức là 3.
bây giờ khi chúng tôi nhấn bộ chọn danh sách
-một danh sách bật lên, liệt kê các thiết bị được ghép nối.
(bạn sẽ cần phải ghép nối mô-đun trước khi mở ứng dụng, như bình thường, mã ghép nối là 1234)
Bây giờ trước khi chọn bộ chọn danh sách, -đặt danh sách với các thiết bị được ghép nối và địa chỉ của chúng
Sau khi bạn chọn thiết bị
- bộ điều hợp bluetooth sẽ kết nối với thiết bị đã chọn
Bây giờ mô-đun đã được kết nối
Bây giờ khi dữ liệu AcclerometerSensor được thay đổi
-Thêm dữ liệu vào văn bản nhãn và gửi nó với tính năng gửi bluetooth.
Bây giờ, phần khó khăn là gửi hai dữ liệu cùng một lúc
# dữ liệu công cụ kế nằm trong khoảng từ 0 đến 9,5 khi nghiêng sang trái và 0 đến -9,5 khi nghiêng sang phải, cũng như vậy khi nghiêng điện thoại xuống dưới và lên trên..
vì vậy chúng tôi có dữ liệu nghiêng trục x và y mà chúng tôi cần gửi…
cho dữ liệu của trục x là X và trục y là Y
vì vậy những gì tôi đã làm là:
Text = "(X * 10 (bỏ dấu thập phân sau đó) +95) * 1000 (nhân với 1000) + Y * 10 (bỏ dấu thập phân) +95"
vì vậy, bây giờ dữ liệu nằm trong khoảng từ 0 đến 190 cho mỗi trục và được thêm vào để tạo thành 190180 trong đó 3 chữ số đầu tiên là trục x và 3 chữ số cuối cùng là tọa độ trục y…
sẽ được gửi đến mô-đun bluetooth và sẽ được chia nhỏ thành dữ liệu thực tế và bản đồ với các góc quay của servo trong mã arduino…
Bước 5: Viết mã Arduino


Sau khi ứng dụng hoàn thành, hãy bắt đầu với mã tôi đã tải lên, tải mã xuống, biên dịch và gửi đến arduino nhưng đợi trước khi bạn gửi mã, hãy tháo các chân rx và tx của mô-đun bluettoh khỏi bảng arduino.. và gửi mã sau đó, bạn có thể gắn các ghim trở lại..
mã nhận được từ bluetooth là một chuỗi có dữ liệu trục của chúng tôi..
bây giờ là Serial.parseInt (); được sử dụng để đọc chuỗi và chuyển đổi chuỗi thành int trong một biến pos.
bây giờ pos có giá trị = 190180 (giả sử) mục tiêu của chúng ta bây giờ là giải mã dữ liệu, tức là loại bỏ trục x và tọa độ y
đối với trục x. chia giá trị cho 1000, điều này sẽ cho giá trị 190.i.e / 1000 = 190
và đối với mô-đun trục y chia giá trị cho 1000, sẽ cho chúng ta 180, tức là giá trị% 1000 = 180
bây giờ tính toán vị trí tối đa và tối thiểu của các servo mà bạn muốn để nghiêng bảng,… trong trường hợp của tôi là 180 và 75 và….
bây giờ chúng ta đã điều phối trục x và y, bây giờ chúng ta chỉ cần lập bản đồ các tọa độ với các góc quay tối thiểu và tối đa mà chúng ta muốn cho các servo của mình….
xem mã để biết chi tiết.
Và chúng tôi đã hoàn tất… tải mã lên, mở ứng dụng kết nối và chơi….
Bạn có biết google có một mê cung được tạo ra cho riêng mình và là một mê cung rất lớn mà bạn từng thấy… đó cũng là động lực để tôi xây dựng một mê cung cho riêng mình.
Vì vậy, cho đến lần sau, hãy vui vẻ..
Đề xuất:
Trò chơi mê cung 3d sử dụng Arduino: 8 bước (có hình ảnh)
")
Trò chơi mê cung 3d sử dụng Arduino: Xin chào các bạn, hôm nay chúng ta sẽ tạo một trò chơi mê cung bằng ARDUINO UNO. Vì Arduino Uno là bảng chủ yếu được sử dụng nên rất tuyệt khi tạo trò chơi với nó. Trong phần mềm có thể hướng dẫn này, hãy tạo trò chơi mê cung được điều khiển bằng cần điều khiển. Đừng quên
Bộ điều khiển trò chơi nhịp điệu Arduino (dành cho trò chơi của riêng tôi): 6 bước
: 6 bước")
Bộ điều khiển trò chơi nhịp điệu Arduino (cho Trò chơi của riêng tôi): Trong phần hướng dẫn này, tôi sẽ chỉ cho bạn cách tôi tạo Bộ điều khiển trò chơi nhịp điệu này từ đầu. Nó liên quan đến các kỹ năng chế biến gỗ cơ bản, kỹ năng in 3d cơ bản và kỹ năng hàn cơ bản. Bạn có thể xây dựng dự án này thành công nếu bạn không có
Bộ điều khiển trò chơi tự làm dựa trên Arduino - Bộ điều khiển trò chơi Arduino PS2 - Chơi Tekken với tự làm trò chơi Arduino: 7 bước

Bộ điều khiển trò chơi tự làm dựa trên Arduino | Bộ điều khiển trò chơi Arduino PS2 | Chơi Tekken với Bàn điều khiển Arduino tự làm: Xin chào các bạn, chơi game luôn thú vị nhưng chơi với Bộ điều khiển trò chơi tùy chỉnh tự làm của riêng bạn sẽ thú vị hơn
Bảng điều khiển trò chơi bỏ túi Arduino + A-Maze - Trò chơi mê cung: 6 bước (có hình ảnh)
")
Arduino Pocket Game Console + A-Maze - Maze Game: Chào mừng bạn đến với người hướng dẫn đầu tiên của tôi! Dự án mà tôi muốn chia sẻ với bạn hôm nay là trò chơi Arduino mê cung, đã trở thành một bảng điều khiển bỏ túi có khả năng tương tự như Arduboy và các bảng điều khiển dựa trên Arduino tương tự. Nó có thể được hiển thị với các trò chơi trong tương lai của tôi (hoặc của bạn) nhờ hội chợ
Trò chơi mê cung Arduino RFID: 6 bước (có hình ảnh)
")
Trò chơi mê cung RFID Arduino: Hôm nay tôi sẽ trình bày cách tôi kết hợp một trò chơi mê cung RFID nhỏ cho Arduino. Mã và các tệp in 3D được bao gồm, vì vậy hãy tự tạo cho mình một bộ theo các bước bên dưới! Tôi muốn làm một món đồ chơi cho trẻ em, nó sẽ pha trộn một