
Mục lục:
- Tác giả John Day day@howwhatproduce.com.
- Public 2024-01-30 13:31.
- Sửa đổi lần cuối 2025-01-23 15:14.


Mạch này là một trình điều khiển con lắc.
Động cơ có thể quay theo chiều kim đồng hồ và ngược chiều kim đồng hồ tùy thuộc vào chiều của dòng điện.
Bạn có thể xem mạch hoạt động trong video.
Quân nhu
Các thành phần: cuộn cảm - 2 (bộ kích, cuộn dây lớn hoặc rơ le), điện trở (hiển thị trong mạch), nguồn điện (hai pin 9 V của một pin 12 V), điốt công suất cao - 2, bìa cứng hoặc bảng ma trận, dây dẫn, 1 dây kim loại mm, hàn, dây cách điện, bóng bán dẫn NPN BJT nguồn - 2, tản nhiệt - 2, bóng bán dẫn NPN và PNP đa năng - 5, vỏ bọc (bìa cứng hoặc hộp nhựa).
Dụng cụ: tuốt dây, kéo, kìm, mỏ hàn.
Công cụ tùy chọn: Máy hiện sóng USB, máy đo đa năng.
Bước 1: Thiết kế mạch

Tôi đã vẽ mạch bằng phần mềm mô phỏng PSpice cũ để giảm thời gian vẽ mạch.
Một cuộn cảm phóng điện lý tưởng ban đầu là một mạch hở. Sau vài giây hoặc mili giây, cuộn cảm được sạc đầy. (cuộn cảm lớn hơn mất nhiều thời gian hơn để sạc) cuộn cảm trở thành tương đương với ngắn mạch. Bạn có thể giảm thời gian sạc bằng cách tăng điện trở mà cuộn cảm "nhìn thấy" hoặc tăng dòng sạc:
Vl (t) = L * di (t) / dt
Đầu ra bóng bán dẫn có thể được mô hình hóa như một nguồn hiện tại, cung cấp một dòng điện không đổi để sạc cuộn cảm. Điốt được dùng để phóng điện hai đầu cuộn cảm và hạn chế hiệu điện thế cực đại trên cuộn cảm phóng điện.
Các bóng bán dẫn Q1a và Q2a làm mạch đệm và bóng bán dẫn Q1b là một bộ nghịch lưu. Nhấp vào liên kết sau để xem một mạch tương tự:
hackaday.io/page/6956-silly-robot
Bước 2: Mô phỏng



Tôi đã sử dụng phần mềm PSpice cho phép mô phỏng nhanh.
Bạn có thể thấy điện áp cuộn cảm sạc và xả (được hiển thị trong biểu đồ đầu tiên).
Bạn cũng có thể thấy rằng dòng điện tối đa của động cơ là 20 mA (được hiển thị trong đồ thị thứ hai).
Bước 3: Tạo mạch

Tôi chỉ làm trình điều khiển động cơ. Tôi đã không làm cho bộ đệm và biến tần.
Tôi thực hiện mạch với hai điốt cũ của Liên Xô.
Tôi đã sử dụng hai điện trở công suất cao 10 ohm tạo ra 5 ohm khi kết nối song song.
Các cuộn dây được thực hiện với hai bộ kích từ một thiết bị cũ.
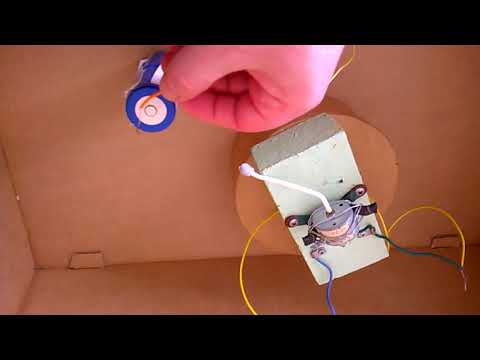
Bước 4: Đặt mạch bên trong hộp

Tôi đã sử dụng một hộp quà cũ làm vật bao bọc.
Bước 5: Kiểm tra

Tôi đã kiểm tra mạch với hai pin 9 V và nguồn điện 15 V.
Đề xuất:
Ô tô được điều khiển từ xa - Được điều khiển bằng Bộ điều khiển Xbox 360 không dây: 5 bước

Ô tô được điều khiển từ xa - Được điều khiển bằng Bộ điều khiển Xbox 360 không dây: Đây là các hướng dẫn để tạo ô tô được điều khiển từ xa của riêng bạn, được điều khiển bằng bộ điều khiển Xbox 360 không dây
ESP8266 RGB LED STRIP Điều khiển WIFI - NODEMCU làm điều khiển từ xa hồng ngoại cho dải đèn Led được điều khiển qua Wi-Fi - Điều khiển điện thoại thông minh RGB LED STRIP: 4 bước

ESP8266 RGB LED STRIP Điều khiển WIFI | NODEMCU làm điều khiển từ xa hồng ngoại cho dải đèn Led được điều khiển qua Wi-Fi | Điều khiển bằng điện thoại thông minh RGB LED STRIP: Xin chào các bạn trong hướng dẫn này, chúng ta sẽ học cách sử dụng gật đầu hoặc esp8266 làm điều khiển từ xa IR để điều khiển dải LED RGB và Nodemcu sẽ được điều khiển bằng điện thoại thông minh qua wifi. Vì vậy, về cơ bản bạn có thể điều khiển DÂY CHUYỀN LED RGB bằng điện thoại thông minh của mình
Tự làm bộ điều khiển bay điều khiển đa hệ điều khiển Arduino: 7 bước (có hình ảnh)
")
Tự làm bộ điều khiển máy bay đa năng điều khiển Arduino: Dự án này là tạo ra một bảng logic máy bay không người lái đa năng linh hoạt nhưng tùy chỉnh dựa trên Arduino và Multiwii
Hướng dẫn Arduino - Điều khiển động cơ bước với trình điều khiển ULN 2003: 5 bước

Hướng dẫn Arduino - Điều khiển Động cơ Bước với Trình điều khiển ULN 2003: Hướng dẫn này là phiên bản viết của " Arduino: Cách Điều khiển Động cơ Bước với Trình điều khiển Động cơ ULN 2003 " Video YouTube mà tôi đã tải lên gần đây. Tôi thực sự khuyên bạn nên kiểm tra nó
Điều khiển các thiết bị điện của bạn bằng Điều khiển từ xa Tv (Điều khiển từ xa) với Màn hình nhiệt độ và độ ẩm: 9 bước
 với Màn hình nhiệt độ và độ ẩm: 9 bước")
Điều khiển thiết bị điện của bạn bằng Điều khiển từ xa Tv (Điều khiển từ xa) Có Hiển thị nhiệt độ và độ ẩm: xin chào, tôi là Abhay và đây là blog đầu tiên của tôi về Các thiết bị điện và hôm nay tôi sẽ hướng dẫn bạn cách điều khiển các thiết bị điện bằng điều khiển từ xa bằng cách xây dựng cái này dự án đơn giản. cảm ơn atl lab đã hỗ trợ và cung cấp tài liệu