")
Mục lục:
- Bước 1: Liều lượng hoạt động như thế nào
- Bước 2: Vui lòng lưu ý trước khi bắt đầu
- Bước 3: Thu thập tất cả các tài liệu
- Bước 4: Kích thước Variuos
- Bước 5: Làm phần thân
- Bước 6: Lắp ráp thiết bị truyền động và chế tạo tấm
- Bước 7: Cải tạo các đặc tính của sóng
- Bước 8: Kết nối điện tử và chương trình
- Bước 9: Điều khiển bộ truyền động bằng chương trình điều khiển bằng menu
- Bước 10: Cách vận hành Wave Tank
- Tác giả John Day day@howwhatproduce.com.
- Public 2024-01-30 13:34.
- Sửa đổi lần cuối 2025-01-23 15:15.



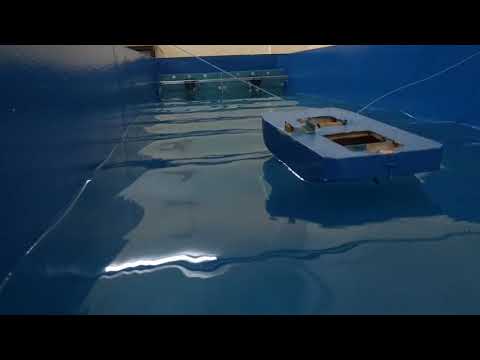
Bể tạo sóng là một thiết bị trong phòng thí nghiệm để quan sát hành vi của sóng bề mặt. Bể tạo sóng điển hình là một hộp chứa đầy chất lỏng, thường là nước, để hở hoặc có không khí ở phía trên. Ở một đầu của bể chứa một thiết bị truyền động tạo ra sóng; đầu kia thường có bề mặt hấp thụ sóng.
Thông thường những chiếc xe tăng này tốn rất nhiều tiền vì vậy tôi đã cố gắng tạo ra một giải pháp thực sự rẻ cho những sinh viên muốn sử dụng chiếc xe này để thử nghiệm các dự án của họ.
Bước 1: Liều lượng hoạt động như thế nào
Vì vậy, dự án bao gồm hai thiết bị truyền động được thực hiện bằng cách sử dụng đùn nhôm v-slot.
Một động cơ bước được kết nối với mỗi thiết bị truyền động và cả hai động cơ đều được điều khiển bởi cùng một bộ truyền động động cơ bước nên không có độ trễ.
Arduino được sử dụng để điều khiển trình điều khiển động cơ. Một chương trình điều khiển bằng menu được sử dụng để cung cấp đầu vào cho arduion được kết nối qua máy tính. Các tấm truyền động được gắn trên giàn v-slot sẽ chuyển động qua lại khi động cơ khởi động và chuyển động qua lại của các tấm này tạo ra sóng bên trong bể. Chiều cao sóng và chiều dài sóng có thể được thay đổi bằng cách thay đổi tốc độ của động cơ thông qua arduino.
Bước 2: Vui lòng lưu ý trước khi bắt đầu

Tôi chưa trình bày hầu hết những điều nhỏ nhặt về cách sử dụng arduino hoặc cách hàn để giữ cho hướng dẫn này nhỏ và dễ hiểu. Hầu hết những thứ còn thiếu sẽ được xóa trong hình ảnh và video. Vui lòng nhắn tin cho tôi nếu có bất kỳ vấn đề hoặc thắc mắc nào liên quan đến dự án.
Bước 3: Thu thập tất cả các tài liệu
- Bộ điều khiển vi mô Arduino
- 2 * Động cơ bước (2,8 kgcm mô-men xoắn cho mỗi động cơ)
- 1 * Trình điều khiển động cơ bước
- Hệ thống giàn 2 * V khe
- Thép hoặc tấm sắt cho thân xe tăng
- Chất làm cứng L để hỗ trợ cơ thể
- Tấm sợi hoặc tấm nhựa để làm tấm dẫn động
- Nguồn cung cấp điện DC 48 volt
Tôi chưa bao gồm vật liệu cho giàn v-slot vì danh sách sẽ rất lớn, chỉ cần google v-slot bạn sẽ nhận được nhiều video về cách lắp ráp nó. Tôi đã sử dụng nhôm định hình 2040. Công suất động cơ và khả năng cung cấp điện sẽ thay đổi nếu bạn muốn chở nhiều tải hơn.
Kích thước bể
Chiều dài 5,50 m
Chiều rộng 1,07 m
Chiều sâu 0,50 m
Bước 4: Kích thước Variuos



Để làm cho mọi thứ đơn giản hơn và hướng dẫn ngắn hơn, tôi đã chụp ảnh của các thành phần khác nhau với một tỷ lệ để bạn có thể thấy kích thước của chúng.
Bước 5: Làm phần thân




Thân được làm bằng gang dày 3 mm.
Chiều rộng bồn là 1,10 mét, chiều dài 5 mét và chiều cao 0,5 mét.
Thân xe tăng được làm bằng thép nhẹ với chất làm cứng xung quanh nó ở bất cứ nơi nào cần thiết. Các tấm thép nhẹ được uốn cong và cắt thành nhiều đoạn khác nhau theo kích thước của bể. Các phần này sau đó được dựng lên bằng cách hàn chúng lại với nhau. Các chất làm cứng cũng được hàn lại với nhau để làm cho cấu trúc chắc chắn hơn.
Tấm đầu tiên được uốn thành kích thước mong muốn trong các phần khác nhau và sau đó các phần này được hàn lại với nhau để dựng lên phần thân. Chất làm cứng đã được thêm vào như một kích thước chất làm cứng hỗ trợ được hiển thị trong hình
Bước 6: Lắp ráp thiết bị truyền động và chế tạo tấm



Các bộ truyền động được sản xuất bằng hệ thống khe cắm v, chúng thực sự rẻ và dễ chế tạo, bạn có thể google trực tuyến cách lắp ráp một trong số chúng. Tôi đã sử dụng vít chì thay cho bộ truyền động đai để tăng khả năng chịu tải. Tôi đã không bao gồm hướng dẫn lắp ráp vì nó sẽ thay đổi theo tải trọng bạn muốn mang. Đối với tôi tải ở tốc độ tối đa là khoảng 14Kg.
Tấm thiết bị truyền động được chế tạo bằng tấm frp, cũng có thể sử dụng acrylic. Khung thép không gỉ được chế tạo để hỗ trợ tấm frp.
Khung chèo
Khung chèo được làm bằng thép không gỉ. Thép không gỉ chống thấm nước và do đó sẽ chống lại sự ăn mòn. Phần hình vuông 2 x 2 cm được sử dụng cho khung mái chèo. Một khung chắc chắn là cần thiết vì rất nhiều tải trọng theo chu kỳ sẽ tác động lên cánh khuấy trong quá trình tạo sóng. Khung thép sẽ không bị uốn cong và do đó sẽ tạo ra sóng hình sin đều đặn.
Một kẹp chữ L tùy chỉnh đã được thực hiện để kết nối tấm truyền động với tấm giàn trên hệ thống vslot.
Bước 7: Cải tạo các đặc tính của sóng



Bể có thể tạo ra chiều cao sóng khác nhau theo yêu cầu. Để tạo ra các chiều cao sóng khác nhau, RPM của động cơ được điều chỉnh. Để có được chiều cao sóng lớn RPM của động cơ được tăng lên vì điều này làm giảm độ dài của sóng. Tương tự để tăng bước sóng RPM của động cơ bị giảm. RPM có thể được điều chỉnh bằng cách chọn tùy chọn RPM tùy chỉnh từ menu.
RPM tối đa = 250
RPM tối thiểu = 50
Dưới đây là ví dụ về độ cao sóng khác nhau được ghi lại bằng gia tốc kế. Hình ảnh đầu tiên là dữ liệu được ghi lại ở RPM cao, kết quả là chúng tôi nhận được chiều cao sóng cao. Hình ảnh thứ hai cho thấy chiều cao sóng giảm và bước sóng tăng lên của đồ thị là dữ liệu được ghi lại bởi máy gia tốc và thể hiện đặc tính sóng thực của sóng được tạo ra.
Bước 8: Kết nối điện tử và chương trình

Trong khi kết nối nguồn điện, hãy cẩn thận kết nối cực kết nối cực dương với cực dương và cực âm với cực âm Thực hiện các kết nối cho động cơ và trình điều khiển như thể hiện trong hình ảnh.) để điều khiển động cơ bước. Kết nối bộ vi điều khiển với PC bằng USB. Khởi động Arduino IDE> Màn hình nối tiếp.
Chương trình được bao gồm trong hướng dẫn và tự giải thích nó sử dụng trường hợp chuyển đổi và các câu lệnh if else để hoạt động. Nó thực sự đơn giản mà một học sinh trung học cũng có thể hiểu được nó.
Đây là liên kết google drive đến chương trình
Chương trình điều khiển Arduino
Bước 9: Điều khiển bộ truyền động bằng chương trình điều khiển bằng menu

Khi bộ vi điều khiển được kết nối đúng cách với PC, bạn sẽ có menu tương tự. Để chọn tùy chọn, chỉ cần nhập số bên cạnh tùy chọn và nhấn enter
Thí dụ:-
Để chọn “Hoạt động ở tần số tối đa”, hãy nhập 1 và nhấn enter.
Để dừng hành động, hãy nhập 0 và nhấn enter.
Dừng khẩn cấp
Để dừng thiết bị truyền động, nhấn số không “0” và nhập.
Để dừng khẩn cấp, hãy nhấn đặt lại trên bộ vi điều khiển hoặc cắt nguồn điện.
Bước 10: Cách vận hành Wave Tank

Chiếc xe tăng này được chế tạo như một phần trong dự án lớn của tôi. Bể đã được thử nghiệm về khả năng tạo ra các sóng thường xuyên khác nhau trong điều kiện đầu biển đối với một mô hình sà lan có tỷ lệ. Việc thử nghiệm đèn tạo sóng đã thành công. Tổng chi phí để phát triển dự án này là Rs. 81, 000 (Tám mươi mốt nghìn Chỉ) trong thời hạn hai tháng.
Đối với bất kỳ câu hỏi xin vui lòng bình luận.

Giải nhất cuộc thi Nước
Đề xuất:
Lập mô hình dựa trên hình ảnh / Chân dung bằng phép đo ảnh: 4 bước

Mô hình dựa trên hình ảnh / Chân dung phép đo ảnh: Xin chào mọi người, Trong bài viết có thể hướng dẫn này, tôi sẽ chỉ cho các bạn quy trình tạo mô hình 3D bằng hình ảnh kỹ thuật số. Quá trình này được gọi là Photogrammetry, còn được gọi là Lập mô hình dựa trên hình ảnh (IBM). Cụ thể, loại quy trình này được sử dụng để tái
Diều hâu: Robot điều khiển bằng cử chỉ bằng tay sử dụng giao diện dựa trên xử lý hình ảnh: 13 bước (có hình ảnh)
")
Gesture Hawk: Robot điều khiển bằng cử chỉ bằng tay sử dụng giao diện dựa trên xử lý hình ảnh: Gesture Hawk đã được giới thiệu trong TechEvince 4.0 như một giao diện người-máy xử lý hình ảnh đơn giản. Tiện ích của nó nằm ở chỗ không cần thiết bị cảm biến hoặc thiết bị đeo bổ sung nào ngoại trừ một chiếc găng tay để điều khiển chiếc xe robot chạy trên
Sử dụng Ngưỡng cường độ thang màu xám thay đổi để hình dung và xác định các điểm bất thường trong hình ảnh chụp X quang: 9 bước

Sử dụng Ngưỡng cường độ thang màu xám thay đổi để hình dung và xác định các bất thường trong hình ảnh chụp X quang: Mục đích của dự án này là xác định và sử dụng một tham số để xử lý hình ảnh chụp X quang quang tuyến xám của các phân loại mô nền khác nhau: Béo, Béo tuyến, & Mô dày đặc. Phân loại này được sử dụng khi bác sĩ X quang phân tích
Khung hình nghệ thuật điểm ảnh LED với nghệ thuật arcade cổ điển, điều khiển ứng dụng: 7 bước (có hình ảnh)
")
Khung nghệ thuật điểm ảnh LED với nghệ thuật arcade cổ điển, điều khiển ứng dụng: TẠO KHUNG NGHỆ THUẬT LED ĐƯỢC ĐIỀU KHIỂN ỨNG DỤNG VỚI 1024 đèn LED hiển thị RETRO 80s ARCADE GAME ART PartsPIXEL Makers Kit - $ 59Adafruit 32x32 P4 LED Matrix - $ 49,9512x20 Inch Tấm acrylic, 1/8 " dày inch - Khói sáng trong suốt từ nhựa vòi -
Làm thế nào để xây dựng một cấp độ máy ảnh tăng sáng cho máy ảnh DSLR: 4 bước (với Hình ảnh)
")
Làm thế nào để xây dựng mức độ sáng của máy ảnh cho máy ảnh DSLR: Bạn đã bao giờ chụp trong điều kiện ánh sáng yếu và nhận thấy ảnh của mình bị lệch chưa? Vâng, tôi chắc chắn có! Gần đây, tôi đã làm rất nhiều việc với việc chụp ảnh phơi sáng lâu và khi tôi ra ngoài thực địa bằng cách sử dụng gorillapod, tôi thấy mình rất mệt